By Eric Lindstrom

The R/V Revelle and the Lighter-Than-Air InfraRed System (on the left corner), as seen from the Surface Salinity Profiler. Credit: Dan Clark.
Kyla Drushka from University of Washington Applied Physics Laboratory (APL) received a National Science Foundation grant to participate in SPURS-2. It is one cornerstone of our work and is entitled “Rain-Formed Fresh Lenses in SPURS-2.” The idea of rainfall resulting in freshwater puddles or lenses at the sea surface is (perhaps) easy to imagine but is very tricky to observe and study in the real world. SPURS-2 will provide a wealth of new data on this subject with which to test the fidelity of our scientific imagination.

A beauty shot of the Surface Salinity Profiler.
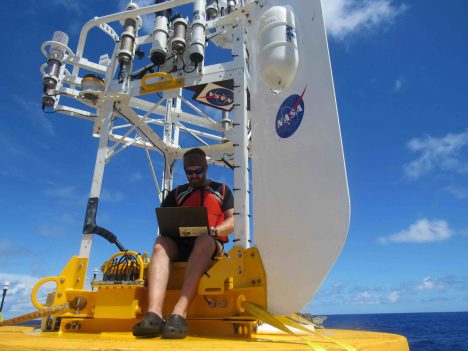
Kyla and the APL crew have a variety of instruments aboard R/V Revelle but the Surface Salinity Profiler (SSP) is central to SPURS-2 science objectives. When you want to know the fate of rainwater after it hits the sea surface, measuring salinity (or equivalently the amount of freshwater) in the upper meter of the ocean is crucial. The profile of salinity in that top meter of the ocean is elusive for a number of reasons – technical and logistical. Technically, salinity sensors require some time and bubble-free water flow to make the measurement. However, normally the sea surface is rapidly moving up and down (because of waves!) so a sensor is not always in the water and away from bubbles until it is several meters below the surface. Finding a way to tow salinity (and other) sensors at fixed, shallow depths following the motions of the sea is another approach. APL scientists and engineers including Andy Jessup, Bill Asher, and Dan Clark designed the SSP to apply this approach.
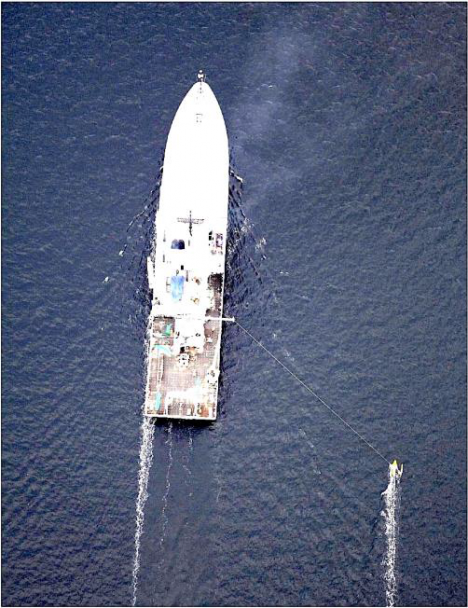
How the Surface Salinity Profiler runs outboard the ship — photo taken from the Lighter-Than-Air InfraRed System balloon camera.

Dan Clark, APL engineer extraordinaire.
The SSP platform is a converted paddleboard with a keel and surfboard outrigger. It is tethered to the ship so it skims the sea surface outside the wake or influence of the ship. Below the paddleboard, on the leading edge of the keel, are salinity (and temperature) sensors at depths of 10 centimeters (4 inches), 30 centimeters (1 foot), 50 centimeters (1.64 feet), and 100 centimeters (3.28 feet), microstructure sensors (to estimate turbulence), and cameras. The Salinity Snake (see my last blog entry) supplements the SSP by providing temperature and salinity in the upper few centimeters of the ocean. The SSP can be towed for many hours before the instrument batteries need refreshing.
Deployment of SSP is most informative when there is a rain event, leading to stratification of the near-surface ocean with less dense fresher water on top of denser saltier water. If there is a rain event ahead of the ship, the SSP goes in the water. Then it can measure how the ocean changes over the periods from before rain, during rain, and recovering from rain. Salinity from several depths and simultaneous turbulence estimates are then used to determine how rainwater mixes into the ocean.
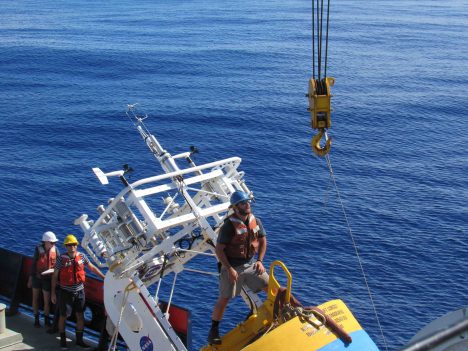
Suneil Iyer with Surface Salinity Profiler on deck (sensor to bottom left on keel)
Suneil Iyer is a new graduate student at University of Washington who will work with Kyla on interpretation of the microstructure measurements from the SSP data. He just arrived in Seattle from his hometown of Kansas City, Kansas, one week before the R/V Revelle departure from Honolulu. He just had time to find an apartment before jumping on a plane for SPURS-2. Graduate school in oceanography can be a blast of new experiences! This is not his first exposure to physical oceanography: Suneil worked on tides in estuaries during his undergraduate work at University of South Carolina.
Kyla Drushka working on the Surface Salinity Profiler.
Kyla Drushka joined UW in 2014 after PhD work at Scripps Institution of Oceanography. She is now an active member of NASA’s Ocean Salinity Science Team and the mission science team for the Surface Water Ocean Topography satellite that is planned for launch in April 2021.
This blog entry goes to press near an auspicious moment on R/V Revelle SPURS-2 voyage. Saturday at 2 am (local time) is the halfway point of our expedition! In our oceanography lexicon we would call this the “hump day” for our voyage. For all you land-loving 5-day-a-weekers hump day might mean Wednesday. For the 24/7 work at sea, we really have only a “hump moment” to mark the halfway point of a continuous work schedule. Like any good NASA activity, people aboard have countdowns running to both our hump moment and our arrival back in Honolulu (8 am on Sept. 23). Amusement is in short supply!
Ben Pietro readies a buoy for deployment.
For SPURS-2 we are installing three moorings that will stay in place for over a year. Our moorings are arrays of instruments dangling from a surface floatation and anchored at the bottom. The moorings eventually will be recovered by R/V Thompson in September or October 2017. They will be recovered by using a release mechanism (acoustically operated) above the anchor.
Emerson Hasbrouck, working in his office.
Two of the moorings are supplied by William Kessler at the NOAA Pacific Marine Envionmental Laboratory. They will use the Prawler (profiler + crawler) technology – an instrument system that crawls up and down the mooring wire to sample the upper ocean on a regular basis. This technology has been perfected since SPURS-1. Andrew Meyer and is buddy Monkey are working the deployment of those moorings.

Two instruments, ready for the WHOI mooring.
The SPURS-2 Central Mooring is supplied by Tom Farrar from Woods Hole Oceanographic Institution under a grant from NASA. This mooring is heavily instrumented with temperature, salinity, and current sensors as well as a sophisticated meteorological package at the surface. This gear is the hub around which the rest of the experiment works. It provides the contextual environmental data over then entire year in which other shorter term more intensive measurement campaigns by R/Vs Revelle, Thompson, and Lady Amber will fit.
Andrew Meyer and Monkey pose with the SPURS-2 Central Mooring buoy.
Each mooring effectively takes one day of ship time to deploy, since daylight and a morning start is preferred. Each deployment starts with the surface buoy and continues with instruments and line/cable until the release and anchor remain on deck with about 3 miles of mooring strung out behind the ship. If all planning and estimating is correct, the ship will be appropriately positioned with regard to the target site so that the anchor can then be dropped. The ocean bottom – 3 miles down – is relatively flat here at SPURS-2 so precise aiming of the anchor drop zone is not necessary.

WHOI mooring with anchor.
Deployment of the central mooring in particular is labor intensive and many in the science party contributed to the effort. he deployment effort was orchestrated by Ben Pietro and Emerson Hasbrouck from the mooring group at Woods Hole. Drew Cole and Carmen Greto provided essential expertise as ship’s scientific technical support. Ben and Drew together lead the team through a solid 10 hours of work. Leah Trafford monitored and logged all the equipment as it was deployed. She was ever present with the clipboard and eyes on the instruments. Raymond Graham had a terrific day serving as Ben’s extra pair of hands, handling all manner of assignments with great dexterity.

Leah Trafford with the mooring log.

Mooring action on the fantail.

Anchor away for the SPURS-2 Central Mooring.
We’ll spend a full day post-deployment with a variety of projects related to the central mooring. We’ll complete a survey of the site to determine the precise location of the anchor (and acoustic release mechanism). We’ll check meteorological equipment against shipboard measurements. We’ll use a small boat operation to the surface buoy to add additional equipment that could not be launched during the primary operation.
After the second PMEL mooring is deployed, Revelle will be moving to begin mapping of the ocean around the central mooring. A box of approximately 180 miles on a side will be the focus of our sampling for more than a week. There is also a deployment of free-floating sensors. I’ll tell you more in the next post about how we sample the ocean with sensors fixed in space versus those fixed to a water parcel.
Meanwhile, we are enjoying our first serious rainstorm of the voyage at our study location. We hope for many more. If we are going to study how the rainfall mixes into the ocean, we really are hailing the rain dowsers to bring more showers!
Stay dry out there folks, but hope that we get soaked!
By Eric Lindstrom
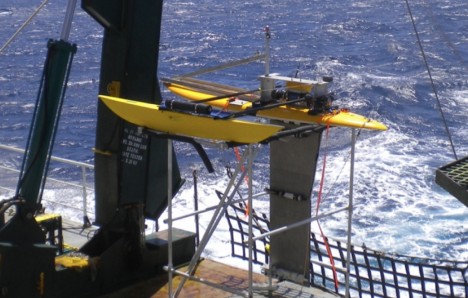
The Surface Salinity Profiler from University of Washington’s Applied Physics Lab, shown here while it was being tested at sea, is now deployed on R/V Thalassa.
The SPURS experiment involves not only sea-going oceanographers but modelers, and of course, remote sensing scientists using satellite data. As part of the daily posts from R/V Knorr I will go into more detail on the role of the models and satellite data in the overall scientific enterprise. I will profile the modeling teams and their interaction with the ship-based team during the voyage.
Numerical models of the ocean, run on supercomputers, can provide high-resolution animations of the physical environment for us sea-going scientists. In order to actually simulate the environment, the models need to take in data from the expedition and make sure the model solution is one that best fits the available data. This process is called data assimilation. (You are more familiar with data assimilation in models than you think – daily weather maps are the result of models and forecasts are done using data assimilation into sophisticated models of atmospheric physics.)
An objective of SPURS is to provide a high-resolution, near-real-time stream of data that can be assimilated into ocean models. Because the ocean is so big and complex, and our at-sea capacity to measure it so puny, we rely on ocean modeling and data assimilation to help us interpret the environment. The model results can be used in planning work at sea and to diagnose the balance of salinity in the upper ocean. The observations are essential to locking model results into the real oceanographic environment. The model is essential to estimating things we cannot measure directly and expanding upon the interpretations provided by the observations.
In SPURS, we hope that we scientists at sea and those ashore can collaborate through the exchange of data and model results. This was not possible as late as a decade ago. Now we have Internet at sea and can exchange information and results for daily planning and analysis.
I will discuss the synergy of models and data much more during posts from the ship in September.
SPURS as an International Enterprise
The SPURS experiment involves a number of expeditions and nations working in cooperation at the single location in the North Atlantic.
The French R/V Thalassa is in the SPURS region now with one U.S. team aboard from University of Washington’s Applied Physics Laboratory. I will give more details in future posts.
Follow-on U.S. expeditions will use R/V Endeavor from University of Rhode Island to follow-up the measurements of R/V Knorr. The first of these two expeditions is in the spring of 2013 and will service SPURS equipment that requires maintenance after 6 months at sea. That expedition will also do more of the “feature” characterization. A second expedition in the fall of 2013 will recover all the moored equipment and gliders, among other duties.
A Spanish cruise is also planned for next spring. The details of this expedition will be subject of a post.
What’s up next?
Next up will be the loading of R/V Knorr on 5 September and a media event at 10 am that day. We set sail on 9/6 at 10 am.
