By Eric Lindstrom
Friday, 5 October 2012 — We got a call today from the Commander of the International Space Station (ISS), Sunita “Suni” Williams. Suni, who was calling while the ISS was passing over Eastern Russia, wanted to congratulate us on our SPURS expedition.

Sunita Williams, Commader of International Space Station.

Eric Lindstrom, Adam Seamans, and Ray Schmitt, during call with the ISS.
We had 30 minutes of wide-ranging conversation about life at sea and life in space. We talked about the beautiful sunrises and sunsets viewed from both Knorr and the space station. Suni has the added bonus of seeing the aurora from ISS and the green flash of the sun lasting for an extended period.
We talked about the naming of the new WHOI research vessel after astronaut Neil Armstrong, which will provide yet another link between space and oceanography for years to come. We talked about superstitions on ships and the ISS — no whistling on the ship seems to be a Navy tradition common to both our vessel and the ISS.
The call was a big boost to morale on the Knorr as we suffered through a day of windy and bumpy conditions inflicted by Tropical Storm Oscar. On the good side, we are finished with our primary science tasks and we are riding the wind and waves toward the end of mission in the Azores.
The talk with ISS also is symbolic of the many and growing links between the exploration of the solar system (outer space) and the exploration of the ocean (inner space). As the Physical Oceanography Program Manager at NASA Headquarters, I see the links every day. However, I suspect that, for starters, many of you were unaware that NASA had anything to do with exploring the ocean. So let me fill you in!
I think there are at least three categories of relationships between inner and outer space to tell you about – first is astronaut skills and training, second is the naming and use of spacecraft and ships as exploration and observation platforms, and third are the intersections in science, remote sensing, and robotics for exploration.
Astronaut Training and Skills
Astronauts must train to live and work in a weightless environment. That is quite difficult to find on Earth, but working under water provides a useful analogue because diving can simulate both weightlessness and working in pressure suits.
The Neutral Buoyancy Laboratory at Johnson Space Center is an enormous pool of water for training astronauts. The NBL contains full-sized mock-ups of the International Space Station modules and payloads.
The NOAA Aquarius Reef Base is an underwater habitat used by NASA on a regular basis for astronaut training.
Few humans posses the construction skills needed to build and maintain the International Space Station. To find qualified astronauts for that work, NASA looked to the deep-sea diving community for “the right stuff”.
Naming of Ships and Spacecraft
Naming spacecraft after ships of exploration (for example, the Discovery and Challenger) has been popular and it seems appropriate that oceanographic ships are named after explorers. The replacement for R/V Knorr was just announced and it will be named the R/V Neil Armstrong after the first astronaut to walk on the moon. Maybe this symbolizes a renewed decades-long commitment by NASA to seagoing exploration and discovery?
The space shuttle ushered in a new regular opportunity for astronauts to view and photograph the Earth and ocean. Similarly, oceanographers on ships can observe the same phenomena at sea level to provide in-depth views.
Science, Remote Sensing, and Robotics
NASA supports the development and use of technologies to explore remote hostile environments across the solar system. Many of these technologies are road tested on Earth in analogue environments, such as deserts, the Arctic, Antarctica, and deep ocean hydrothermal vents. Since we believe there are other oceans in the solar system to explore, like Europa, there is a growing interest in using the Earth’s ocean as a proving ground for remote sensing and robotic technology. This has been going on for more than 30 years.
In 2011, NASA launched the Aquarius mission to study variations in the surface salinity to the ocean. Aquarius senses the ocean at L-band (microwave emissions) in a frequency protected for radio astronomy. There are numerous galactic sources for L-band radiation and these have been well mapped by NASA astronomers. The fact that the radio astronomer’s map is reflected off the sea surface, makes for and interesting connection between the inner and outer space.
For years, oceanographers have been training astronauts for visual observation of the ocean and photography from space, and in turn the astronauts have produced many images of interesting oceanographic phenomena from above.
In the coming years, ISS will be home to a NASA Physical Oceanography/JPL-constructed instrument to measure winds over the ocean. It’s a follow-on from the QuikSCAT project of 1999 that is still flying today. The new project is known as Rapid Scat and is under development for the Columbus module on ISS.
So that’s a quick tour of some of the inner and outer space connections. The longer this oceanographer works at NASA, the more he discovers. It’s a quite fruitful relationship. It was great to have a Navy Captain in space talking to oceanographers at sea today. Suni William, best of luck on the rest of your mission on International Space Station – and no whistling!

Sunset on the Sargasso Sea.
By Eric Lindstrom
A team of scientists from University of Washington is focusing on long-term observations in SPURS region with autonomous instruments: Argo floats (Drs. Stephen C. Riser, Jeffrey Nystuen, and student Jessica Anderson), Seagliders (Drs. Craig Lee, Charlie Eriksen, and Luc Rainville), and Lagrangian floats (Drs. Eric D’Asaro and Andrey Shcherbina). Their sentinel instruments will provide a larger-scale context for the SPURS moorings for the next year. Jessica (Jesse) and Andrey are aboard Knorr to look after all the deployments.

Andrey Shcherbina.

Jessica Anderson.
In order to connect the salinity that Aquarius sees at the ocean surface with processes throughout the ocean, SPURS is devoting resources to understanding of the processes happening in the near-surface layer. This area from the surface “skin” of the ocean to depths of 10-20 feet is where salinity measurements are most lacking.
In SPURS we added salinity sensors to normal global surface drifters. Enhanced Argo floats have extra sensors for the top 20 feet of the ocean. These will help to fill this gap in our salinity observations and help us better interpret Aquarius satellite data. SPURS data will be used to better characterize the near-surface variability, structure, and response of temperature and salinity to rain, wind, and ocean currents on time scales of hours to months.
Some of the details are fascinating. Twenty-six Argo-type profiling floats are being deployed over the course of the SPURS expedition and will remain in operation for four to five years. These floats will join the network of over 3,500 Argo floats currently monitoring the world’s oceans. Their additional sensor suites include the Surface Temperature and Salinity (STS) and Passive Acoustic Listener (PAL) packages. To ensure float longevity, typical Argo floats quit collecting data about 20 feet below the sea surface. The STS sensor, however, makes high vertical resolution (about 4 inches, or 10 centimeters) measurements of temperature and salinity from 100 ft depth all the way to the sea surface. The PAL sensor uses a hydrophone to acoustically measure wind speed and rainfall while the float is drifting between vertical profiles.

An Argo float at the ocean surface awaiting descent to more than 3,000 feet.
Additionally, the floats use Iridium satellite telemetry so the mission (time, depth, frequency of profiles) of the float can be modified after launch. Currently, sixteen of the floats deployed in a grid around the SPURS central mooring are making synchronous profiles once a day at noon, providing a daily “snapshot” of the SPURS region. In the future, the mission of these floats will be altered once again, so that both diurnal and longer time scale processes can be resolved.
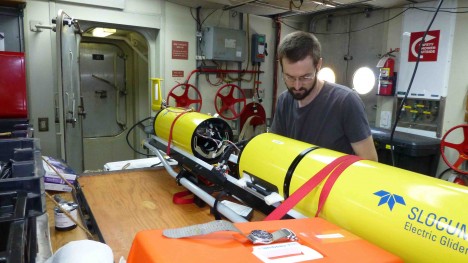
Three Seagliders have been deployed in SPURS. They are built for endurance and efficiency. They will slowly patrol the salinity-maximum region moving up and down through the water column and monitoring temperature, salinity, oxygen and chlorophyll content of the waters surrounding the moorings. These Seagliders will operate continuously until spring 2013, when they will be recovered and replaced with a new threesome.

SeaGlider 190 away.
SPURS Seagliders are specially equipped to monitor ocean mixing. The upper ocean is filled with turbulence – chaotic assemblages of eddies that mix warmer and saltier water near the surface with cooler and fresher water below. Seagliders will record minute fluctuations of temperature associated with the tiniest of the turbulent eddies, hundreds of times per second. The gliders will navigate a racetrack pattern around the moorings for the duration of the experiment, allowing us to see how mixing varies with depth and time in response to changing winds, weather patterns, and ocean currents.
The final awesome piece of technology from our Seattle team is the Mixed-layer Lagrangian floats (MLFs) that will characterize turbulent mixing from another perspective. A “Lagrangian” description of a fluid motion (named after mathemetician Joseph Lagrange) is taken from the perspective of particles moving with the fluid flow. In that sense, most floats and drifters are Lagrangian instruments to some extent since they follow ocean currents. MLFs are fully Lagrangian: they can also follow much weaker vertical motion of the water. They do it by closely monitoring surrounding water and changing their volume to remain neutrally buoyant. They also have a set of six flexible wings that can be extended horizontally and “anchor” the float to the surrounding water. As a result, the MLFs can directly follow the large turbulent eddies in the mixed layer and observe their evolution. It is the interplay of the large and small eddies that controls ocean mixing, so MLF observations uniquely complement microstructure turbulence measurements obtained by Seagliders.
MLF deployment (A.Shcherbina on the line.)
MLF being carefully lowered during deployment.

Aboard Knorr, Jesse and Andrey work closely together to support then entire Seattle-based SPURS team. Jesse makes sure the Argo floats get deployed at their appropriate location and will continue to check up on the floats over the coming weeks/years.
Together they look after the gliders testing and deployment – making sure they are well trimmed – not too light, not too heavy – like Goldilocks, everything has to be just right! Once deployed glider operations go to a group of pilots back in Seattle, who will keep track of the gliders’ progress, collect the ocean data, and direct the instruments on their sampling track. We worked with them directly via satellite phone so we could do simultaneous profiles with the ship’s instruments and the glider. When they say “dive” to a glider from Seattle, we can watch from the ship as it slips beneath the waves just yards away!
Lagrangian floats are even more sensitive to the precise ballasting – even the amount of paint that they may wear off over the next year needs to be taken in consideration! However, some things are impossible to predict – such as algal growth or how much fish love the float. So the pilots in Seattle need to keep constant track of the float telemetry and instruct it to go through the ballasting routine on a regular basis. They also balance the sampling strategy to optimize battery life throughout the floats’ one-year deployment. Overall, the operators have remote control of about 300 variables that determine the float’s behavior. Keeping those in check will be Andrey’s job for the next year, once we get him back home.
Your blogger asked Jesse and Andrey to describe their feelings about SPURS. Their responses were superb, so I won’t paraphrase!
Jesse said: “It’s been great to be a part of such a large, well-planned field campaign. I am amazed at all the varied data we are collecting and can’t wait to start piecing a small part of it together to further unravel the ocean’s roll in the global freshwater cycle as part of my PhD work. I am also excited to finally deploy (after a failed attempt on my last research cruise) my first Argo float! Working with the data from these floats for years, it is about time I finally wave one off to begin its journey in the great wild blue yonder. Working in front of your computer screen, it is easy to feel disconnected from the dynamic environment I am trying to understand. So being out a sea is a great rejuvenator. There is a unique beauty that is found only in the middle of the ocean with no land in sight. The stars are that much brighter, the sky that much bigger and the color of the ocean – the most unreal crystalline blue!”
Andrey said: “Taking part in a concerted effort to understand the physics behind the formation of the saltiest water in the open ocean is truly fascinating. The latest technology and support from NASA enables us to study this unique area at an entirely new level. I am looking forward to observing turbulent mixing of heat and salt in the upper ocean as it varies daily, monthly, seasonally. Relating these observations to the pathways of salt and fresh water in the ocean is a fascinating puzzle to unravel. But the best thing is that it is nearly impossible to predict what we will discover, as each new voyage brings in something totally unexpected. I’m sure every scientist aboard Knorr would agree that it is this sense of wonder that keeps us going out to sea again and again.”
By Eric Lindstrom
A number of the instruments deployed during SPURS are “works in progress.” They work well, but need exercise in new or more challenging environments to perfect them. The whole of SPURS is an experiment, taking salinity measurement in the ocean to an entirely new level. Extended deployment of sensor webs in hostile and distant environments is something NASA needs to perfect for the future of Earth System Science research and for planetary exploration. One of the overarching goals for those involved is to advance the use of autonomous measurement platforms for real-time global oceanography.
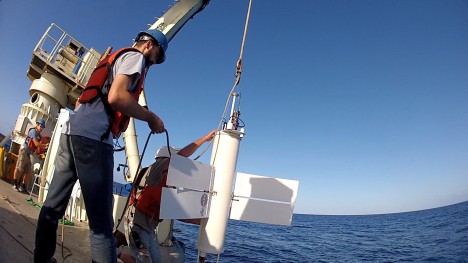
The Prawler (Profiler + Crawler) instrument from NOAA Pacific Marine Environmental Laboratory (PMEL) is one example of SPURS exercising a work in progress. It is also a place where we can see common goals between NASA and NOAA in physical oceanography.

Prawler closed on the laboratory bench.
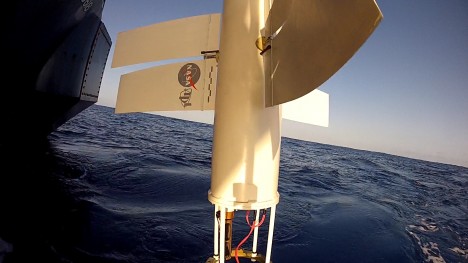
The Prawler is a wave-powered subsea instrument that eliminates the need for multiple sensors on a mooring line. During descent, it makes a profile using whatever sensors have been installed and communicates those via inductive modem to the surface buoy (from there they are communicated via satellite to shore). Once the Prawler falls to the pre-determined bottom depth (arount 1,640 feet, or 500 meters), a micro-processor activates a ratcheting mechanism and harnesses the wave motion of the mooring to crawl back up the mooring line.
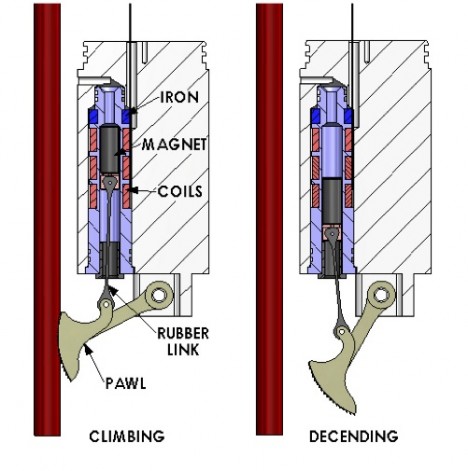
Diagram showing the ratchet mechanism on Prawler that allows it to climb the mooring wire.
The Prawler has been years in development and testing. This expedition we deployed two NOAA moorings where the Prawler is the primary instrument. The Prawler will make from five to 30 profiles per day (the average is about 20 profiles per day). For SPURS, the Prawler measures temperature, conductivity, and pressure. Those are core variables that are easily conversed to temperature, salinity, and depth.
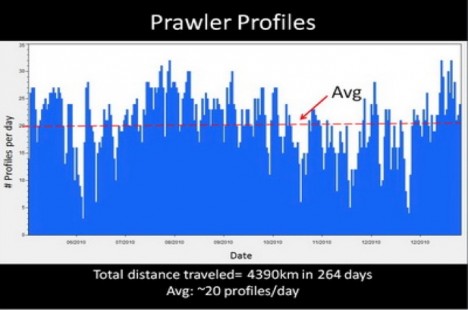
An example (from a prior test of Prawler in the Pacific Ocean) of how many profiles one can expect to make using one Prawler during the course of a year. Provided by Billy Kessler, NOAA PMEL.
Billy Kessler at NOAA PMEL and University of Washington is leading a NOAA SPURS project to test the Prawler technology. Billy and I were in graduate school at University of Washington together in the early 1980s and shared the same PhD mentor, Prof. Bruce Taft. It’s wonderful to be working with Billy again after all these years!
John Shanley and Andrew Meyer (aboard the Knorr) are two NOAA PMEL engineers who have been involved with Prawler mooring design tests for the last 3 years. They have already participated in some major tests of Prawler on moorings (a 7-month and a 4-month deployment in Hawaii, each time with two Prawlers, and many tests in Puget Sound). SPURS offered a great opportunity for a full year deployment near the heavily-instrumented Woods Hole mooring whose deployment I described in an earlier post.

John Shanley.

Andrew Meyer.
John and Andrew are fortunate to work in a small group of engineers where they get to work on all aspects of the Prawler, from design input to the actual fabrication of the instruments, to testing materials and components, to full ocean deployments. “From art to part,” as the boss likes to say! The NOAA PMEL mooring shop has a long history of excellence providing products that meet both researcher and operational requirements.
Seeing the Prawler used in SPURS after years of development is the light at the end of the tunnel for John and Andrew. This project has been a cumulative effort involving their entire engineering group. There have been four radically different versions, countless numbers of modifications, long days and weekends of machining parts. They have seen Prawler grow from just a few scribbles on a white board to deployment of the “finished” product over the stern of Knorr on this voyage. They both describe persistence as the key to success. It almost brings a tear to your eye to hear Andrew describe to me “the last few touches before deployment as we assemble and ballast, to bolting it on the mooring line and dropping it into the ocean, bring a great sense of accomplishment.”
For Andrew and John being out here on Knorr to deploy the Prawler is just icing on the cake. The interaction with people from other institutions and seeing many different ways and means of measuring salinity truly puts the Prawler capability in a new perspective. They are both standing watches and working with the other teams to expand their ocean instrumentation expertise. They certainly now know that they too are on the leading edge of global real-time ocean observing in the 21st century. From interactions aboard ship they go home energized with ideas for the next innovation!
By Eric Lindstrom
“The techniques I developed for studying turbulence, like weather, also apply to the stock market.”
Benoit Mandelbrot
If Mandelbrot’s statement is true, maybe oceanographers studying ocean microstructure (caused by turbulence), besides writing journal articles about mixing in the ocean also work on padding their retirement accounts with stunning stock market acumen?
Jokes apart, how does ocean microstructure work? The microstructure component of SPURS features measurements of very small-scale (inch or smaller) variations of temperature, salinity, and velocity, used to infer mixing rates due to turbulence and convection in the upper ocean.
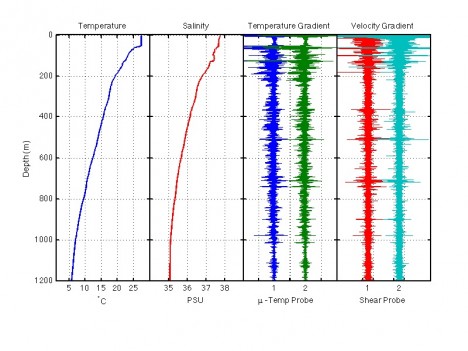
Profiles of Temperature, Salinity, two channels of small-scale temperature gradient and two channels of small-scale shear from a dive of the Vertical Microstructure Profiler (VMP). The depth intervals with the strongest variations in temperature gradient and vertical shear are the places where the ocean is mixing the strongest. These raw data are carefully processed to tell us how much of the salinity change that we see is due to the vertical mixing rates. They can also tell us which processes are causing the mixing, such as shear instability or salt fingers.
Lou St. Laurent, together with Woods Hole Oceanographic Institution colleagues Carol Anne Clayson and Ray Schmitt, are the scientists principally focused on these issues. Their work is supported by the National Science Foundation and is another good example of the inter-agency cooperation spanning SPURS.
Ken Decoteau, a WHOI engineer, leads the microstructure group’s sea-going effort. Together with James Reilly, a research technician from UMass-Dartmouth/SMAST, Oliver Sun, a WHOI postdoctoral investigator, and Alec Bogdanoff, a graduate student in the MIT/WHOI Joint Program for Physical Oceanography, they run 24-hr operations of two instrument systems, a vertical microstructure profiler (VMP) and turbulence-sensing gliders (T-gliders).
Ken Decoteau.

Jim Reilly.

Oliver Sun.

Alec Bogdanoff.
The first, a vertical profiler (Rockland Scientific VMP5500), is lowered into the water and released. In its pressure housing, it carries batteries and electronics. The data collected by the external sensors is recorded to a disk drive inside the instrument. The steel ballast weights it carries cause it to sink to a pre-set depth. Upon reaching this depth, a trigger mechanism is fired, causing the weights to be released, and the instrument to float back to the surface. The instrument is then recovered, the data downloaded, and preparation for the next deployment begins. Although the instrument is capable of profiling to a depth of 18,000 feet (about 5,500m), most of the profiles on this expedition are being done to a depth of 4,000 feet (1,200m). These deployments take about one hour from the time we release the instrument until it re-surfaces.

The Vertical Microstructure Profiler, ready for deployment.
A second kind of measurement (of longer duration) is conducted using two Teledyne-Webb Slocum Gliders (T-gliders), each carrying a Rockland Scientific MicroRider. The MicroRider is similar to the VMP, but is much smaller in size since it is not designed to go as deep, and does not carry its own batteries and CTD; it draws battery power from the glider. The T-glider does not utilize direct propulsion (as in a motor), instead changing its buoyancy to move up and down in the water column and using wings to translate this motion from vertical to horizontal (a.k.a. gliding). This low power design means microstructure data can be collected continuously over a time period covering weeks, even months, with minimal intervention.

Small boat crew filming a T-glider in trial deployment.
During SPURS, one T-glider is covering the upper 230 feet (70m) of the water column while stationed in a small area close to the highly-instrumented WHOI mooring, while the other T-glider is covering the upper 660 feet (200m) of the water column while doing continuous transits between the WHOI mooring and PMEL-N mooring.
So far, more than 30 VMP microstructure profiles have been taken by two twelve-hour shifts working 24/7. With the minimal additional amount of effort required to deploy and to periodically checkup on the two gliders, we have collected over 700 additional profiles of the upper ocean from the gliders. Utilizing these two different platforms simultaneously has a dramatic positive effect on our sampling efficiency, and illustrates why autonomous sampling techniques have become much more common in recent years.
The measurements of microstructure variations in temperature, salinity, and velocity are crucial to SPURS estimating the salinity balance. We need to know how the less saline waters to the south and south are mixed with the saltier waters near the salinity maximum in the North Atlantic.
Maybe, after all, it is like the stock market! The “value” (measurement) of our “commodity” (salinity) depends on a complex global “marketplace” (a salinity balance equation) forced by wind, evaporation and precipitation and “trading” in complex oceanic processes (circulation and eddies) acting in the end through “derivatives” (turbulent mixing) to determine the values we see. Maybe these oceanographers are in fact sitting on a gold mine!
Truth be told, their mathematical wizardry is focused on understanding the ocean and the water cycle, not the stock market and the business cycle. However, old Benoit Mandelbrot was entirely correct! A few brilliant men like him can live in both worlds and we all profit.
By Eric Lindstrom

The bridge of the Research Vessel Knorr. (Photo by Tom Kleindinst, Woods Hole Oceanographic Institution.)
Almost everyone can imagine the bridge of a ship – from the movies, a tour of a ship, or maybe you are the master of your own vessel. It is the place where control of all ship operations is commanded. On the bridge of the Knorr, an officer and a seaman are always present and in full control of the vessel, for the safety of all aboard and effectiveness of the ship as a research platform. It’s amazing what they can do and the various skills that are required to command a research vessel.
The bridge and chart room house all the ways and means needed to safely navigate Knorr, maintain her stability, maneuver her on station, and to communicate with anyone as necessary. Like the dashboard of a (sophisticated) car, they have a display of key engineering functions and to operate the ship in both manual (i.e., you driving) and autopilot (car cruise control) modes.
One key function of the master that you may not know about is to complete calculations assessing the stability of the ship and to ballast her correctly as fuel is consumed or heavy scientific gear is deployed. Seawater ballast tanks are available to compensate for changing conditions (Knorr uses between 1,800 and 3,800 gallons of fuel per day).
There is an overarching sense of situational awareness that permeates life on the bridge of any research vessel. The captain and the mates are always alert of changing conditions like weather, location, time, ship traffic, and science plans. With the rhythm of the ship, they are also keenly attuned to watch changes, meals, rest periods, and fresh coffee brewing. Also, there is all the important watch for fish. The chief engineer must be informed 24/7 of any sighting. We all need our protein…
That leaves the oceanographers to focus on the science bits – like what the tiny variations of salinity are in the top 3,000 feet of the ocean! That’s sweet. The bridge looks after us, we look after the ocean, and everyone is, well… working. Not much else to do out here.
Knorr has amazing capability to stay on station. In gentle sea conditions, it’s quite possible to stay on location to within a few feet. The officer on watch can set the ship to keep position, so their attention can be shifted to observing deck operations further aft on the ship.
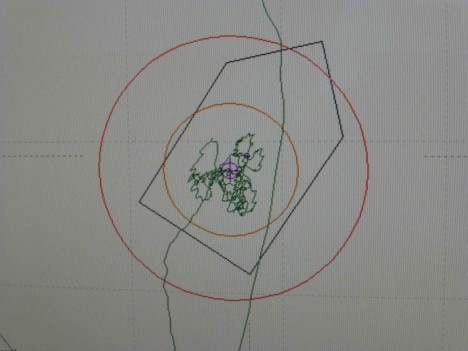
The track of the Knorr while on station. The orange circles have radii of 4 feet and 8 feet.

The view from the starboard bridge station aft.
Captain Adam Seamans has been a Master of Knorr since 2008. He started with Whoods Hole Oceanographic Institution (WHOI) as an Able Seaman in 2000, where one of his first duties was to clean a science cabin after a head overflowed. My, how times have changed! Now he commands the 22-member crew of Knorr and navigates her to all corners of the globe. Maybe he still has to deal with a lot of crumby jobs, but they are mostly of the cleaner variety!

Captain Adam Seamans holding the Knorr’s heading box, which contains three wooden blocks with ten digits inscribed in each. One can set the heading of the ship 0-360 degrees and place this in front of the seaman steering the ship’s course. For the photo, the heading is set at 279 – the length of Knorr in feet.
The Knorr has enormous capability for communication – via satellite phone or internet or radio. In close quarters with foreign vessels, Knorr can communicate the old-fashioned way via flags. Sequences of brightly colored flags have universal meanings to mariners.

The Knorr’s signal flags box.
Finally, I thought I would call your attention to training. All the officers aboard Knorr have great experience and through my decades of oceanography, I have found maritime officers always passing their knowledge and experience forward to others. Teaching and sharing, honestly, what a great concept! It makes for safer seas.
On this voyage we have a learner, a cadet named Anna, from Sweden. She is just 18 and approached a WHOI captain about being a cadet aboard one of their vessels. Sometimes you need to be careful what you wish for! Anna has been working all the jobs on the ship for our expedition. Just today, she was driving a winch by herself for the first time, looking happy and proud! Her initiative and hard-working nature are an example for all of us. Sometimes the teachers become the students… Anna, Bravo Zulu!

Cadet Anna drives the CTD winch.
