By Eric Lindstrom
A number of the instruments deployed during SPURS are “works in progress.” They work well, but need exercise in new or more challenging environments to perfect them. The whole of SPURS is an experiment, taking salinity measurement in the ocean to an entirely new level. Extended deployment of sensor webs in hostile and distant environments is something NASA needs to perfect for the future of Earth System Science research and for planetary exploration. One of the overarching goals for those involved is to advance the use of autonomous measurement platforms for real-time global oceanography.
The Prawler (Profiler + Crawler) instrument from NOAA Pacific Marine Environmental Laboratory (PMEL) is one example of SPURS exercising a work in progress. It is also a place where we can see common goals between NASA and NOAA in physical oceanography.

Prawler closed on the laboratory bench.
The Prawler is a wave-powered subsea instrument that eliminates the need for multiple sensors on a mooring line. During descent, it makes a profile using whatever sensors have been installed and communicates those via inductive modem to the surface buoy (from there they are communicated via satellite to shore). Once the Prawler falls to the pre-determined bottom depth (arount 1,640 feet, or 500 meters), a micro-processor activates a ratcheting mechanism and harnesses the wave motion of the mooring to crawl back up the mooring line.
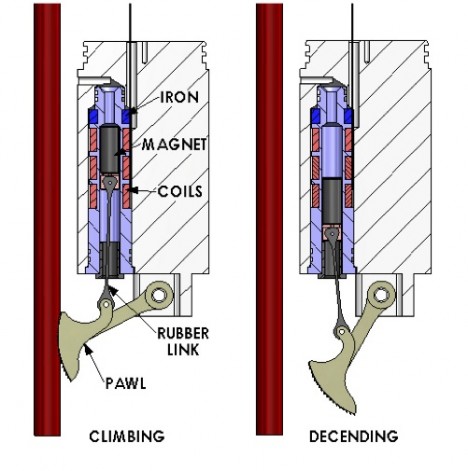
Diagram showing the ratchet mechanism on Prawler that allows it to climb the mooring wire.
The Prawler has been years in development and testing. This expedition we deployed two NOAA moorings where the Prawler is the primary instrument. The Prawler will make from five to 30 profiles per day (the average is about 20 profiles per day). For SPURS, the Prawler measures temperature, conductivity, and pressure. Those are core variables that are easily conversed to temperature, salinity, and depth.
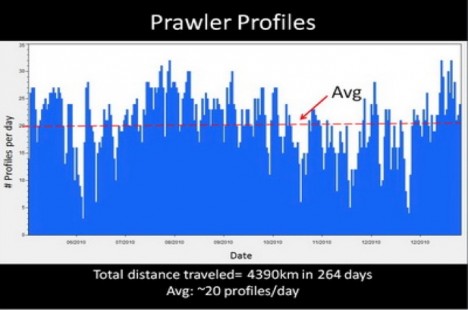
An example (from a prior test of Prawler in the Pacific Ocean) of how many profiles one can expect to make using one Prawler during the course of a year. Provided by Billy Kessler, NOAA PMEL.
Billy Kessler at NOAA PMEL and University of Washington is leading a NOAA SPURS project to test the Prawler technology. Billy and I were in graduate school at University of Washington together in the early 1980s and shared the same PhD mentor, Prof. Bruce Taft. It’s wonderful to be working with Billy again after all these years!
John Shanley and Andrew Meyer (aboard the Knorr) are two NOAA PMEL engineers who have been involved with Prawler mooring design tests for the last 3 years. They have already participated in some major tests of Prawler on moorings (a 7-month and a 4-month deployment in Hawaii, each time with two Prawlers, and many tests in Puget Sound). SPURS offered a great opportunity for a full year deployment near the heavily-instrumented Woods Hole mooring whose deployment I described in an earlier post.

John Shanley.

Andrew Meyer.
John and Andrew are fortunate to work in a small group of engineers where they get to work on all aspects of the Prawler, from design input to the actual fabrication of the instruments, to testing materials and components, to full ocean deployments. “From art to part,” as the boss likes to say! The NOAA PMEL mooring shop has a long history of excellence providing products that meet both researcher and operational requirements.
Seeing the Prawler used in SPURS after years of development is the light at the end of the tunnel for John and Andrew. This project has been a cumulative effort involving their entire engineering group. There have been four radically different versions, countless numbers of modifications, long days and weekends of machining parts. They have seen Prawler grow from just a few scribbles on a white board to deployment of the “finished” product over the stern of Knorr on this voyage. They both describe persistence as the key to success. It almost brings a tear to your eye to hear Andrew describe to me “the last few touches before deployment as we assemble and ballast, to bolting it on the mooring line and dropping it into the ocean, bring a great sense of accomplishment.”
For Andrew and John being out here on Knorr to deploy the Prawler is just icing on the cake. The interaction with people from other institutions and seeing many different ways and means of measuring salinity truly puts the Prawler capability in a new perspective. They are both standing watches and working with the other teams to expand their ocean instrumentation expertise. They certainly now know that they too are on the leading edge of global real-time ocean observing in the 21st century. From interactions aboard ship they go home energized with ideas for the next innovation!
By Eric Lindstrom
Your SPURS blogger, Eric Lindstrom, showing off the NASA logo on the surface buoy.
The central mooring at the SPURS site is a critical piece of gear. It will provide us with a time series of upper ocean properties at one location over the entire year. We’ll build the other SPURS measurements around this spot on this and future voyages. We’ll “fly” the gliders in patterns centered on this location.
Our first order of business is to survey the bottom depth in the vicinity of the proposed mooring location (near 25N, 38W). The water depth we are aiming for is near 17,390 feet (5,300 meters).
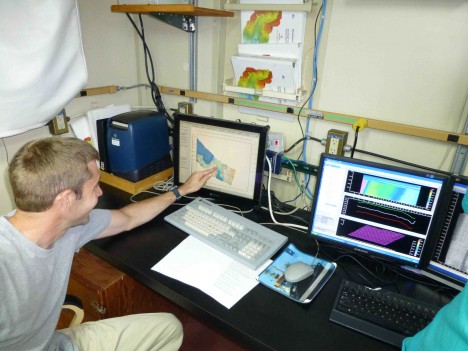
Tom, working on the survey of bottom depths prior to mooring deployment.
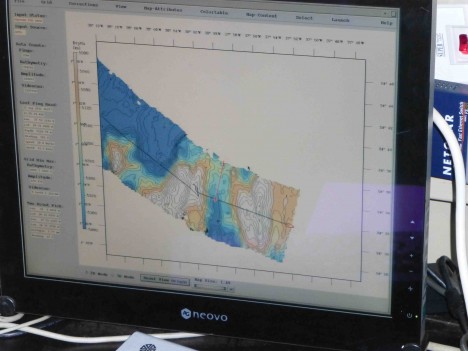
Seabeam maps the bottom along a swath 8 miles wide.
The mooring is anchored to the bottom (with a 10,000 pound anchor). A large, heavily-instrumented buoy at the surface holds the entire string of instruments below. Just above the anchor is an acoustic release mechanism that can disengage the mooring from the anchor on command from the ship next year. Above the release are 80 glass floats (inside hardhats) that serve to float the bottom of the mooring to the surface after release.

80 glass floats in hardhats go at the bottom of the surface mooring.
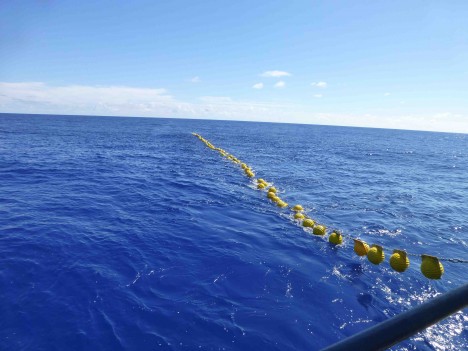
The glass floats at the bottom of the WHOI mooring, trailing behind the R/V Knorr.
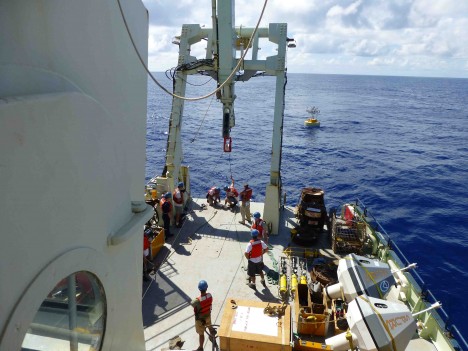
It’s a process of many hours to deploy the mooring. The ship will position itself some miles from the proposed anchoring site (depending on wind and currents) and start steaming toward the spot very slowly. The length of mooring and gear are then deployed over the stern starting with the top of the mooring, the surface buoy. After that various current meters, salinity and temperature sensors are attached in turn with various lengths of chain and shackles. As they are joined, they are in turn lowered over the stern and the surface buoy begins to distance itself in the ship’s wake. About 8 hours after the start of the deployment, the 16,000 feet of mooring is laid out on the surface behind the ship, and all that’s left on deck is the anchor.
At this point, location is everything. If timed correctly, the ship will be some distance past the location mooring intended to land on the bottom (say 10 percent of the water depth). If so, it is time to drop the anchor. As it falls, the length of mooring will drag it back toward the spot it will finally come to rest. We will see the surface buoy begin to rush swiftly back toward the ship (hopefully finishing up at its intended target location).
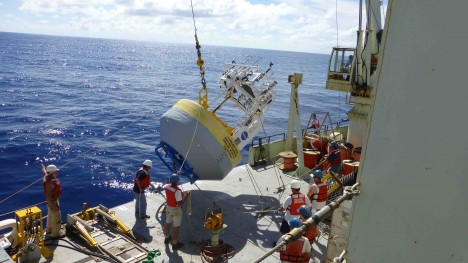
Lifting the WHOI buoy for deployment.
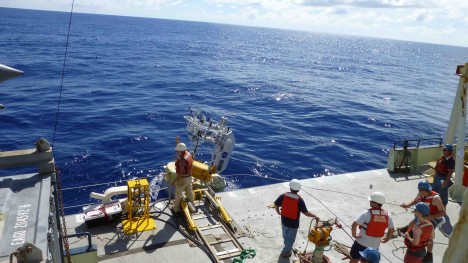
The buoy is away!
The mooring wire and equipment are gradually added.
Such work has been done thousands of times over the decades, but every deployment presents its own challenges of ocean bottom topography, wind, currents, and equipment. The length of the mooring needs to precisely cut for the water depth in which it is anchored. If it is too long, the mooring swings around too much at the surface. If it is too short, the mooring may be under too much stress or snap.
alert message
